常州凯特工业机器人有限公司坐落于江苏常州天宁区,专业从事焊接系统的开发与制造、焊接切割技术咨询与服务的专业性高新技术企业。公司资力厚、技术先进,产品远销泰国、越南、菲律宾等东南亚国家和地区。

自有软件专利通过知识体系贯标认证,高新技术企业自主研发团队,可根据客户需求非标定制。获得各项专利30余项。

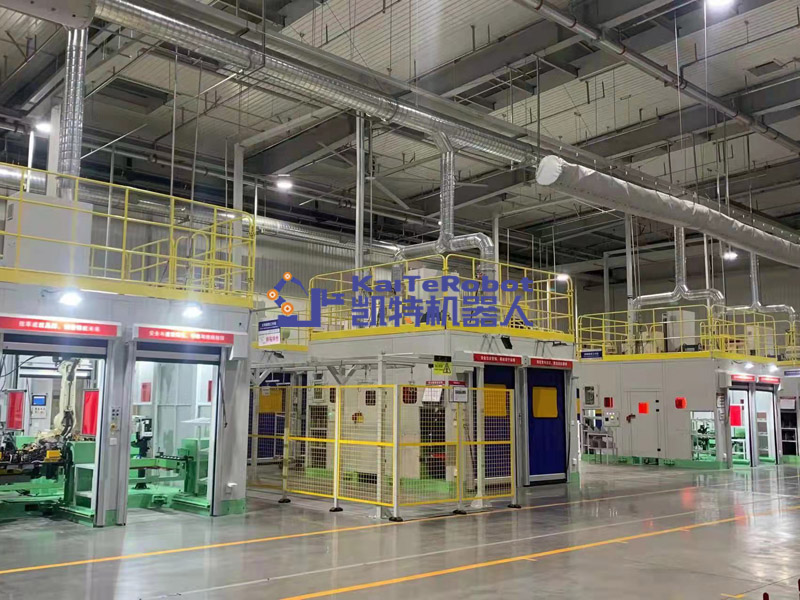
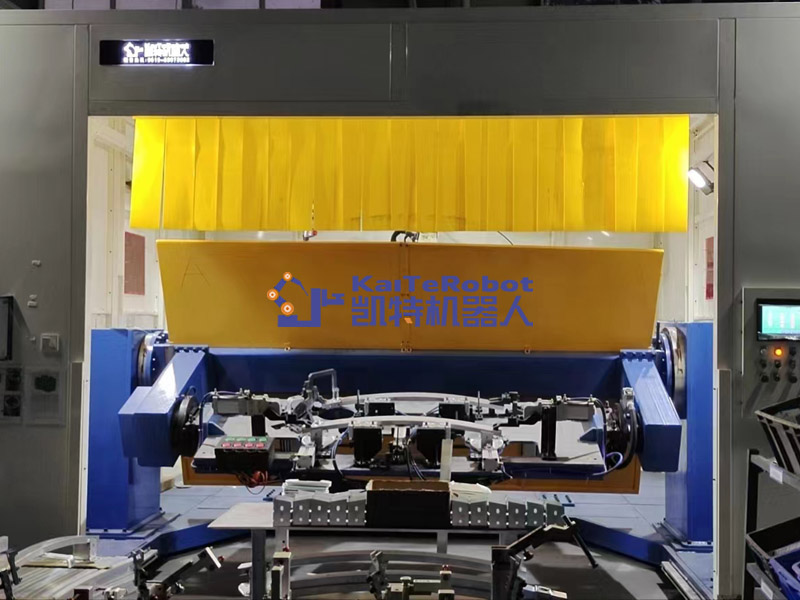
您可以第一时间了解到凯特的最新动态,与您分享行业的最热资讯,时刻在为您服务。在焊接通用设备、焊接结构件、工装夹具、焊接自动化设备及控制方面积累了丰富的实践经验。

秉持着“树立一种优质形象:优质服务是生命,客服满意是目的”的经营理念,实施差异化战略,在细分市场发力,为客户提供高品质的工业机器人和智能制造解决方案。凯特工业机器人一直倾心打造好的品质,竭力追求贴心的服务。
常州凯特工业机器人有限公司
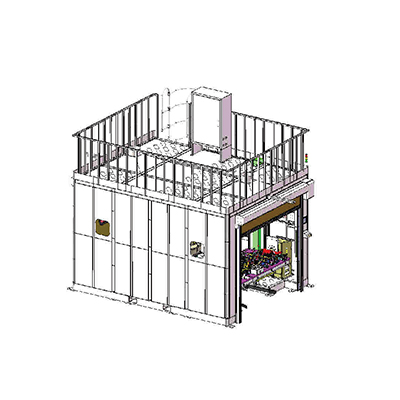
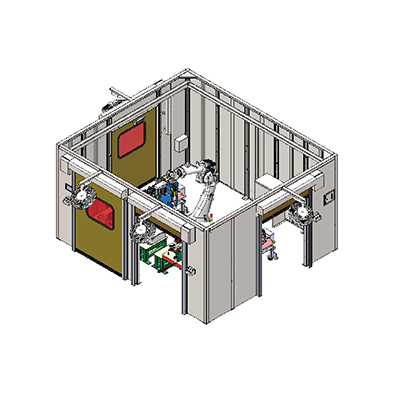
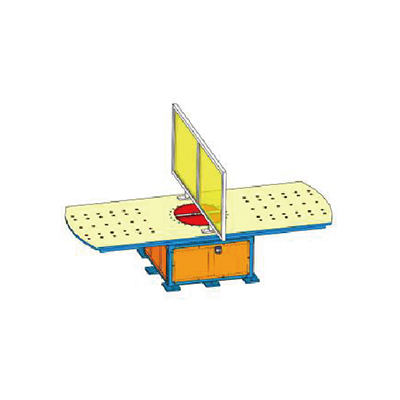
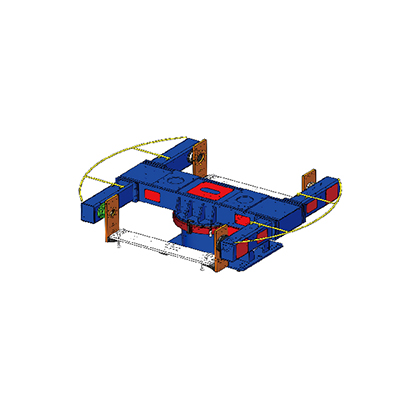
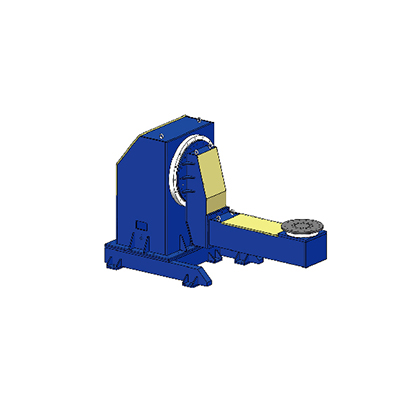
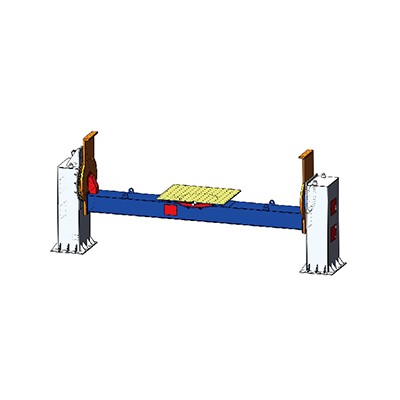
常州凯特工业机器人有限公司坐落于江苏常州天宁区,专业从事焊接系统的开发与制造、焊接切割技术咨询与服务的 专业性高新技术企业。公司主要产品有OTC焊接机器人、OTC焊机,焊接机,工装,夹具,检具,非标自动化焊接设备、机器人应用系统等,
发布:2022-08-30 浏览:6976


微信扫码咨询
联系我们

扫一扫